
Canada’s AQUA-bot invades G20
By DE staff
CAD/CAM/CAE McGill UniversityMcGill University researchers demonstrate one-of-a-kind, 6-legged amphibious robot for world press.
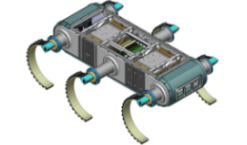
At the G20 coference last week, a McGill University robotics team led by Gregory Dudek, showcased its AQUA2, a semi-autonomous, amphibious robot designed to walk, swim and dive to depths up to 120 feet.
Developed by Dr. Dudek and doctoral students Junaed Sattar and Anqi Xu, the AQUA2 vehicle uses six independently controlled fins to propel itself, either on land or through water. Unlike traditional thrusters, the legs make the AQUA2 a highly maneuverable vehicle that poses no danger to humans or sea life and can land or take-off with minimal impact. A variety of sensors allow it to estimate its position and navigate.
“I was thrilled to have this opportunity to tell the world’s journalists about my work,” said Dr. Dudek. “Our robot has multiple uses in growth areas, such as environmental protection, infrastructure management and even security, and it’s great that the journalists are fascinated to learn more about concept-to-market research at McGill.”
In addition to the development of amphibious and underwater robots, Dr. Dudek’s research focuses on sensing for robots, including looking for solutions to the complex problem of creating a robot capable of knowing where it is, accurately navigating around obstacles and detecting interesting objects. Page two (AQUA2 Specs —–>
<!– By use of this code snippet, I agree to the Brightcove Publisher T and C found at https://accounts.brightcove.com/en/terms-and-conditions/ . –> brightcove.createExperiences();