
Modular Robotics
By Steven Scanlan
Automation Motion Control modular RoboticsRobotic Design's ANAT modular technology outmaneuvers traditional rigid robots.
Although robotics has advanced significantly in the past several decades, efforts have primarily focused on programming and software. Robotic architecture, on the other hand, has largely been limited to six degrees of freedom (DOF): three for positioning and three for orientation.

As a result, says Charles Khairallah, M.Eng, robot movement is inefficient, and programming becomes highly complex due to the inherent singularity point, which allows only one possible way for the robot to reach from point A to B. This makes traditional robots infeasible for tasks where obstacles must be avoided and also requires the arm to consume unnecessarily large amounts of power.
"When a traditional robot has to move through a large envelope of work, say 0 to 180 degrees and back after one second, each joint has to make a long trajectory," he says. "There is no other choice because there are only three links for positioning. With a modular robot, made of many links, each joint only has to move as little as 3 arc seconds to perform a task and the power consumption is very low."
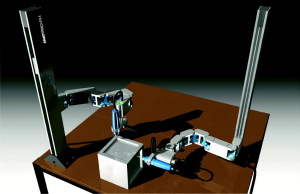
For the past 12 years, Khairallah and his company, Montreal-based Robotics Design, have been developing a modular robotics system the company calls Articulated Nimble Adaptable Trunk (ANAT) technology. Composed of H, C and T shaped modules, the chain-type modular robot operates like a multi-jointed arm. Linked together, the modules mimic the movement of a snake, allowing the arm to maneuver in tight spaces and "slither" around obstacles.
ANAT robots are anchored to the ground by a motorized guide rail that moves the arm up and down. For lateral actuation, each module incorporates a brushless DC servo motor in its central axis. When the modules are connected together, the system’s inverse kinematics algorithm, working together with the robot’s control algorithm, recognizes the number and type of each module, allowing their movement to be programmed so that they work together to a common purpose much like the cells of an organ.