
Rise of the DeltaBot
adamin
Automation Motion Control Machine Building RoboticsBeckhoff Automation helps AEMK Systems reboot high-performance robot designed for cost- and space-sensitive applications.

Much like the historical progression of computer technology, cost-effective robot technology is steadily advancing into areas that were previously too cost-sensitive to apply it. Food manufacturing, packaging and warehousing are prime areas to experience the next wave of robotics with high performance, low cost robots entering the marketplace from leading suppliers.
One of those suppliers is Waterloo, Ont.-based AEMK Systems. Established in 2006 to commercialize the results of five years of research at the University of Waterloo, the company provides high-speed, vision-based robotics systems for applications in the food industry, packaging and automated warehousing.
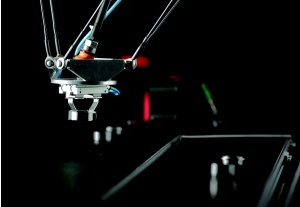
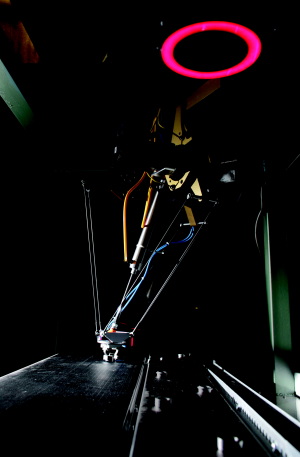
The company’s breakthrough product is the DeltaBot, a patented ultra high-speed parallel robot that uses steel cables in place of rigid arms and expensive, high-precision joints. At top speed, AEMK’s three and four-axis models can perform 120 pick-and-place cycles per minute. While fast, the DeltaBot’s main benefit isn’t its speed says AEMK President and University of Waterloo professor Amir Khajepour.
“In order to have the highest market share possible in the robot industry, AEMK strives to provide customers with the most cost effective robots possible with simple integration, low maintenance cost and outstanding customer service,” he says.
The DeltaBot’s cost effectiveness is largely due to its steel cable arms, which reduce moving inertia and mechanical equipment costs. For example, because tension in the robot’s cables helps manage backlash in the gears, more expensive joints can be eliminated and very little maintenance is required to ensure high repeatability. In addition, the cost of components and fabrication is much lower compared to conventional pick and place robots.
And due to its inherently simple design, the DeltaBot can also be installed in many labor-intensive applications with high capital cost barriers to incorporating automation equipment. Since its passive cables control the movement of end effectors, the robot’s workspace can be easily scaled to adapt to any application.