
Robotic arm extend authors’ signatures over cyberspace
By André Voshart
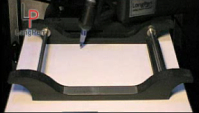
Motion Control Innovation RoboticsThe aptly named LongPen precisely replicates the signature of the person at a remote location.



The Government of Ontario produces many official documents that require signatures, and for security reasons, these papers cannot for sent by fax or mail for signing. However, the province recently adopted a long-distance signing station that was originally developed with the aid of author Margaret Atwood.
When Margaret Atwood called Matthew Gibson from a hotel room in the spring of 2004, she was in the middle of a grueling, multi-city, multi-country book tour. Knowing she has a 6 a.m. fight to catch, she wondered if there was a better way. She imagined being able to sign books for her fans from afar, and at that moment, she had the seed of an idea that would, years later, become the LongPen Freehand Script Robot.
The company that designed the arms says “LongPen signatures are approved in both the United States and Canada as legal.” For the government’s use, they chose the LongPen BusinessWriter, which allows ink-and-paper documents to remain in the province’s cabinet office at Queen’s Park in Toronto while they are signed from other locations.

But in order for the idea to take off, Atwood teamed up with Gibson—who has a history in developing ideas into reality—and created Unotchit Inc. (pronounced “you no touch it”), the firm under which they would produce the device. Senior systems engineer John Wiltshire, who has been with the project since Day 1, led the design team through multiple incarnations, starting with a simple X-Y plotter, then moving up to experimentations with a joint-articulated single appendage.
“We tried our version of that,” Gibson said of the single appendage, “and it just wasn’t rigid or strong or fast enough … and it sort of shook itself to death and burst into flames—and fell off the table.”
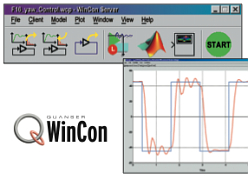
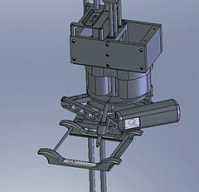
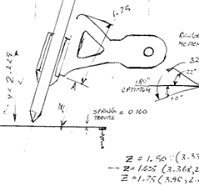
But when Jacob Apkarian, founder of Quanser Consulting Inc. in Markham, Ont., stumbled on the LongPen project in the newspaper, Unotchit had moved on was developing a prototype using linear actuators. Quanser is a leader in the development of real-time control systems, having developed haptic and simulator technologies, such as remote surgery, and Apkarian thought he could help. Gibson, in turn, had been looking to refine Unotchit’s design—so he decided to invest in a dialogue with Quanser in the summer of 2006. » Learn about the design progress and see sketches and images on the next page