
Modular Robotics
Mike McLeod
Automation Motion Control Machine BuildingBeckhoff’s modular ATRO robotics system addresses shortcomings of industrial robots.
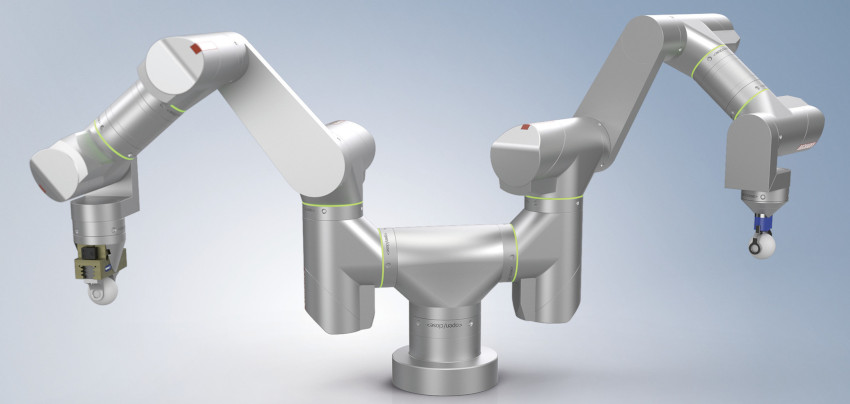
A multi-arm configuration of Beckhoff Automation’s modular ATRO robotics system, composed of a base unit, a Y-shaped link module and multiple motor modules.
(Photo credit: Beckhoff Automation)
According to the latest World Robotics report by the International Federation of Robotics (IFR), the number of industrial robots installed in 2022 hit a record high of more than half a million. In total, the IFR report found that the number of operational robots globally reached approximately 3.5 million units, also a new record.
For all their popularity, industrial robots, especially those in the ~10kg payload range, aren’t without their challenges. Beyond the upfront expense, integrating robotics with existing workflows and equipment can be a drawn out endeavor that may incur the costs of commissioning, custom programming, employee training. And that’s assuming the robot’s role doesn’t change for the foreseeable future.
To address these and other shortcomings, Beckhoff Automation announced its ATRO robotic system last summer. In characteristic style, the company showed it wasn’t content to be an also-ran in the market, as the ATRO incorporates innovative improvements on the typical small to medium six-axis robot.
First and foremost is the system’s modularity. Instead of a pre-constructed arm, the ATRO system is composed of a base unit and variously shaped motor and link units that can be combined, added to and later repurposed as required. Each segment attaches to the next via a self-centering Hirth coupling held in place by a self-locking screw connection.
Mountable in any orientation, the base units incorporate the connection ports for the robot – more on this later – as well as its own servo motor, EtherCAT drive, holding break and double encoder. The motor modules come in two shapes (I-shape and L-shape modules), each available in five power sizes. Lacking drives, the link modules come in I-shape, L-shape and Y-shape, the last of which allows for more than one robotic arm to fork from a common base unit.
Whatever the configuration, the company says a complete robot can be constructed in place with little tooling by a single person since each segment is relatively light. Once connected, a ring light indicator verifies that the segment has been properly attached and recognized. An electronic nameplate in each segment allows the company’s TwinCAT software to recognize the robot’s kinematic pieces and configure a digital twin of the completed robot.
According to Beckhoff Motion Product Manager, Christian Mische, the philosophy of the ATRO is similar to the interconnected linear motors track segments of Beckhoff’s XTS conveyance system. In essence, the approach allows customers to build the conveyor or robot they need and may need in the future rather than one they have to accept.
“If you buy a robot for a specific application, then it is what it is,” Mische says. “If you want to change it later on for different applications, you can’t make it longer or have a higher payload or something like that. The ATRO is flexible in that you can create two-axis kinematics now but, later on, evolve that to multi-axis kinematics by reusing the modules you’ve already bought.”
To illustrate, Mische says customers could create a 1-axis indexing table from just an ATRO base unit. Later, with the addition of some motor and link modules, the base unit can be changed to a 3-axis delta bot, 4-axis picker or a 5-axis paletizer. Add in Y- or X-shaped link module, and the ATRO becomes a multi-armed robot with 7 or more axes. In addition, Beckhoff says the ATRO is easier to fix than a conventional robot, since a faulty module can be swapped out.
Given the extensive number of single- and multi-arm configurations possible, it would seem that the routing of power, data or pneumatic cabling could quickly become a tangled mess. However, this highlights the ATRO system’s other defining feature. As mentioned previously, the ATRO base unit contains all the robot’s ports; from there, all channels, including power, data and fluid, are contained internally within the robot arm.
“Usually, robots are limited because you have the cables on the outline of the robot,” Mische explains. “If you are lucky, you can turn it by 360 degrees, but then you have to go back and unwind it. ATRO can turn 360 degrees in one or the other direction endlessly. And that could be helpful for some specific applications, because it saves time in that you don’t have to go back the long way.”
For control, the ATRO system taps into an industrial PC and the company’s TwinCAT software for programming. As such, ATRO can easily integrate with the company’s smart conveyance and vision systems, as well as TwinCAT’s machine learning and analytics functions for predictive maintenance.
For less demanding tasks, the system can be configured using a teach pendant, but the company makes clear that ATRO isn’t a cobot.
“The idea with cobots is you want to collaborate with it and if it hits you, it stops nicely,” Mische explains. “The regulations to make that happen, however, require the cobot to not move as fast as a standard industrial robot. When we started designing [ATRO], we debated whether to focus on it being a cobot or on high speed. Through market research, we found that a lot of people were buying cobots, but then ended up putting them in a cage and running them faster, because they want more production out of it. At the end of the day, customers want to make parts, so we’re focused on making a fast and efficient industrial robot.”
It should be noted that ATRO has yet to be officially released. However, Beckhoff does offer evaluation kits, with defined module sets, to facilitate real world testing. Currently, there are three kits with escalating payload and reach capabilities: 3 kg/0.6m, 5 kg/0.9m and 10 kg/1.3m.
“We have prototypes running but ATRO is still in development,” Mische says. “Because of its unique features, in that we have media running through all the motor and link modules, we need much more experience to get that ready. The plan is to release ATRO in 2025.”
www.beckhoff.com